



Remote controlled robot solution
Remote controlled robot solution for business continuity
Remote controlled robot solution for business continuity

No Specialized Knowledge
Our remote-controlled robots are designed for immediate use after installation, without requiring any specialized knowledge or lengthy training.
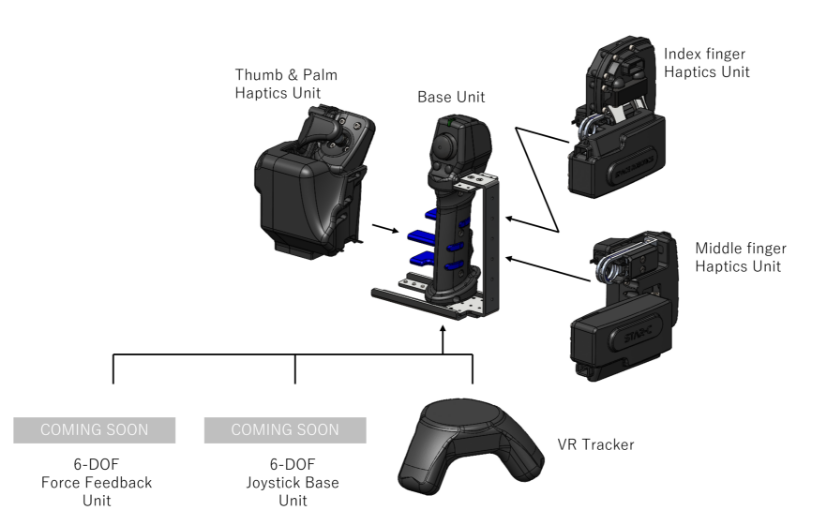
The dedicated controller can be installed on a desk, while enabling intuitive operation and improved work efficiency.
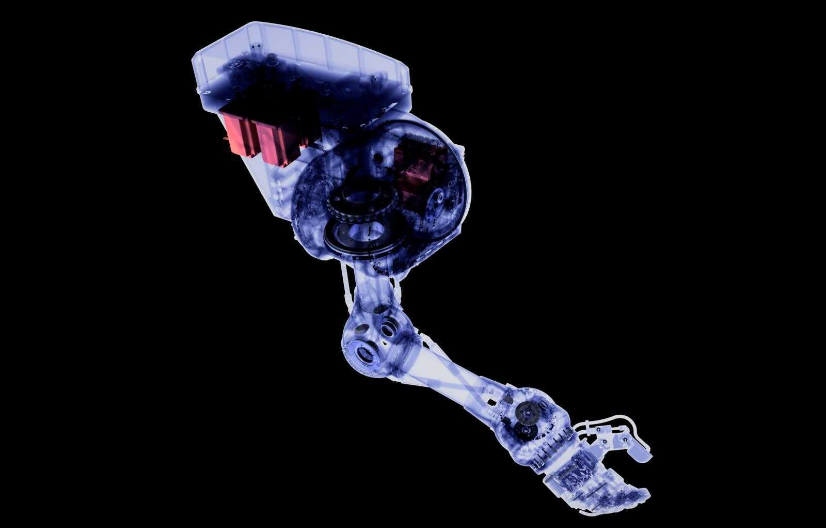
The multi-fingered robot hand can handle general tasks without needing to be replaced with a dedicated robot hand for each specific purpose. Furthermore, the interface of the robot hand is designed
to be compatible, making it easy to switch to a dedicated hand as needed.

Safety and Productivity
Ensuring worker safety is our top priority, but balancing safety and work efficiency with conventional technology has been difficult.
Our remote work solutions not only reduce non-operational time required to ensure worker safety, but also contribute to increased productivity by reducing physical and mental stress on workers in harsh
environments, improving their motivation and creativity.

Perfect Tracablity
Our products allow for monitoring and recording of robot movements, achieving complete traceability.
Recorded data includes not only camera footage, but also robot motion data, which can be utilized for quality assurance and improving work efficiency. For example, by accumulating motion data and issuing warnings or interruptions when workers perform different operations, it is possible to always perform the same task even when workers are changed.
In addition, comparing data between highly skilled and less skilled workers can be used as a tool for effective training.

Sustainability
Our product enables a significant reduction in entry into restricted areas such as radiation-controlled zones and P4-level virus labs.
This results in a reduction in the use of disposable products by operators, decreased preparation time for contamination prevention, and a reduction in waste after use. As a result, our product greatly contributes
to cost reduction in special environments.
No Specialized Knowledge
Our remote-controlled robots are designed for immediate use after installation, without requiring any specialized knowledge or lengthy training.
The dedicated controller can be installed on a desk, while enabling intuitive operation and improved work efficiency.
The multi-fingered robot hand can handle general tasks without needing to be replaced with a dedicated robot hand for each specific purpose. Furthermore, the interface of the robot hand is designed
to be compatible, making it easy to switch to a dedicated hand as needed.
Safety and Productivity
Ensuring worker safety is our top priority, but balancing safety and work efficiency with conventional technology has been difficult.
Our remote work solutions not only reduce non-operational time required to ensure worker safety, but also contribute to increased productivity by reducing physical and mental stress on workers in harsh
environments, improving their motivation and creativity.
Perfect Tracablity
Our products allow for monitoring and recording of robot movements, achieving complete traceability.
Recorded data includes not only camera footage, but also robot motion data, which can be utilized for quality assurance and improving work efficiency. For example, by accumulating motion data and issuing warnings or interruptions when workers perform different operations, it is possible to always perform the same task even when workers are changed.
In addition, comparing data between highly skilled and less skilled workers can be used as a tool for effective training.
Sustainability
Our product enables a significant reduction in entry into restricted areas such as radiation-controlled zones and P4-level virus labs.
This results in a reduction in the use of disposable products by operators, decreased preparation time for contamination prevention, and a reduction in waste after use. As a result, our product greatly contributes
to cost reduction in special environments.
Area
Biotechnology
Biotechnology