



Products
遠隔操作ロボットソリューション
遠隔操作
ロボットソリューション

専門知識不要
当社の遠隔操作ロボットは、特別な専門知識や長時間のトレーニングを必要とせずに導入後直ぐに使用可能な構造となっております。
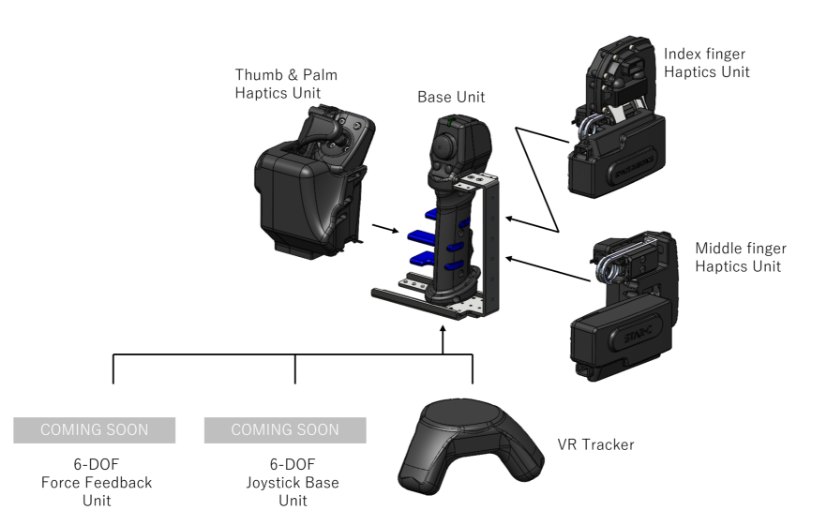
また、専用のコントローラは机上に設置できる大きさとしつつ、直感的な操作と作業効率性の向上を実現、多指ロボットハンドについては、個々の目的のための専用のロボットハンドへと交換することなく、汎用的な作業を処理できます。
なお、ロボットハンドのインターフェースは互換性を持った設計となっているため、必要に応じて専用ハンドへも簡単に変更できます。
専門知識不要

安全性と生産性を両立
作業者の安全が最優先であるため、従来技術において安全性と作業効率性の両立は困難でした。
当社のソリューションによる遠隔作業の実現により、作業者の安全確保に要する準備/対策などの非稼働時間を削減するだけでなく、過酷な環境下での業者の肉体的および精神的負担を軽減する事により、作業者のモチベーション向上と創造性を高めることで、生産性の向上に寄与します。
負担の軽減
向上

トレーサビリティ
私たちのソリューションは、ロボットの動作を監視・記録することが可能で、完全なトレーサビリティを実現することができます。
記録可能なデータはカメラの映像だけでなく、ロボットのモーションデータも含まれるため、データは作業の品質保証用途と作業効率の向上に活用することができます。
例えば、モーションデータの蓄積と、作業者が異なる操作を行った際に警告・中断を発信することで、仮に作業者が変わった場合においても、常に同じ作業を行う事が可能になります。
また、作業効率の高い熟練作業者と低い作業者のデータを比較することで、効果的な教育を行うためのツールとして活用することも実現可能です。
データ化

特殊環境下でのコスト低減
私たちのソリューションにより、放射線管理区域やP4レベルウィルス室などの制限区域への入室を極力減らすことが可能となります。
その結果、作業者が使用するディスポーザブル製品の削減、汚染防止に費やす準備時間の低減、使用後の廃棄物の減容が可能となり、特殊環境下におけるコスト低減へ大きく寄与することができます。
削減
低減
専門知識不要
当社の遠隔操作ロボットは、特別な専門知識や長時間のトレーニングを必要とせずに導入後直ぐに使用可能な構造となっております。
また、専用のコントローラは机上に設置できる大きさとしつつ、直感的な操作と作業効率性の向上を実現、多指ロボットハンドについては、個々の目的のための専用のロボットハンドへと交換することなく、汎用的な作業を処理できます。
なお、ロボットハンドのインターフェースは互換性を持った設計となっているため、必要に応じて専用ハンドへも簡単に変更できます。
専門知識不要
安全性と生産性を両立
作業者の安全が最優先であるため、従来技術において安全性と作業効率性の両立は困難でした。
当社のソリューションによる遠隔作業の実現により、作業者の安全確保に要する準備/対策などの非稼働時間を削減するだけでなく、過酷な環境下での業者の肉体的および精神的負担を軽減する事により、作業者のモチベーション向上と創造性を高めることで、生産性の向上に寄与します。
負担の軽減
向上
トレーサビリティ
私たちのソリューションは、ロボットの動作を監視・記録することが可能で、完全なトレーサビリティを実現することができます。
記録可能なデータはカメラの映像だけでなく、ロボットのモーションデータも含まれるため、データは作業の品質保証用途と作業効率の向上に活用することができます。
例えば、モーションデータの蓄積と、作業者が異なる操作を行った際に警告・中断を発信することで、仮に作業者が変わった場合においても、常に同じ作業を行う事が可能になります。
また、作業効率の高い熟練作業者と低い作業者のデータを比較することで、効果的な教育を行うためのツールとして活用することも実現可能です。
データ化
特殊環境下でのコスト低減
私たちのソリューションにより、放射線管理区域やP4レベルウィルス室などの制限区域への入室を極力減らすことが可能となります。
その結果、作業者が使用するディスポーザブル製品の削減、汚染防止に費やす準備時間の低減、使用後の廃棄物の減容が可能となり、特殊環境下におけるコスト低減へ大きく寄与することができます。
削減
低減
領域
バイオテクノロジー
バイオ
テクノロジー